I am a research engineer in robotics and autonomous systems with a track record of contributions to highly challenging research and engineering projects. In particular, I have expertise and hands-on experience in classical and optimal control systems, path planning and state estimation.
I have recently graduated with a Master's degree in Mechanical Engineering from ETH Zurich, focusing on classical/optimal control systems and state estimation. I performed my master's thesis under Dr. Roland Brockers in the Robotic Aerial Mobility Group at the NASA Jet Propulsion Laboratory, co-supervised by ETH's Autonomous Systems Lab under Prof. Roland Siegwart.
In parallel to my studies, I interned in NASA JPL's Computer Vision Group (2017) and worked as an engineer (2015) and team leader (2016) at AMZ Racing, ETH's world-record-breaking Formula Student Electric team. After graduating, I continued to work as a research assistant in ETH's Autonomous Systems Lab.
I strongly believe that advanced control and planning algorithms, combined with rapid advances in perception and machine learning, will enable the next moonshots of our time, significantly improving the safety and efficiency of many of our daily activities. Yet, the field of robotics is still relatively young, and many hurdles remain to be cleared until fully autonomous systems can be deployed on a large scale with sufficient safety and robustness guarantees. I am excited to help tackle these important challenges.
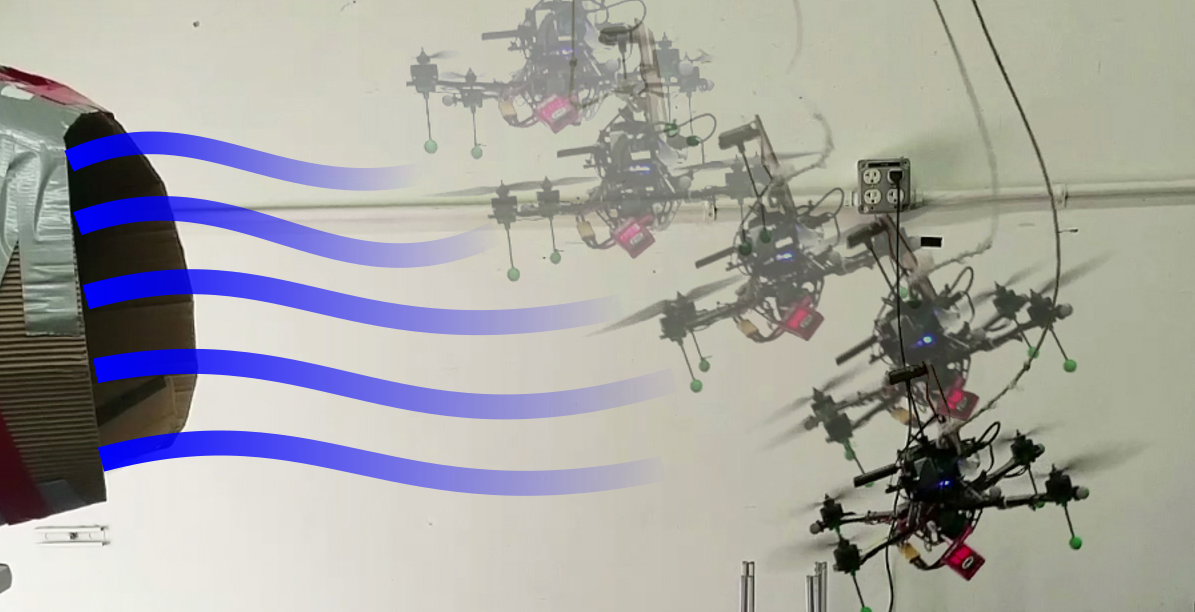
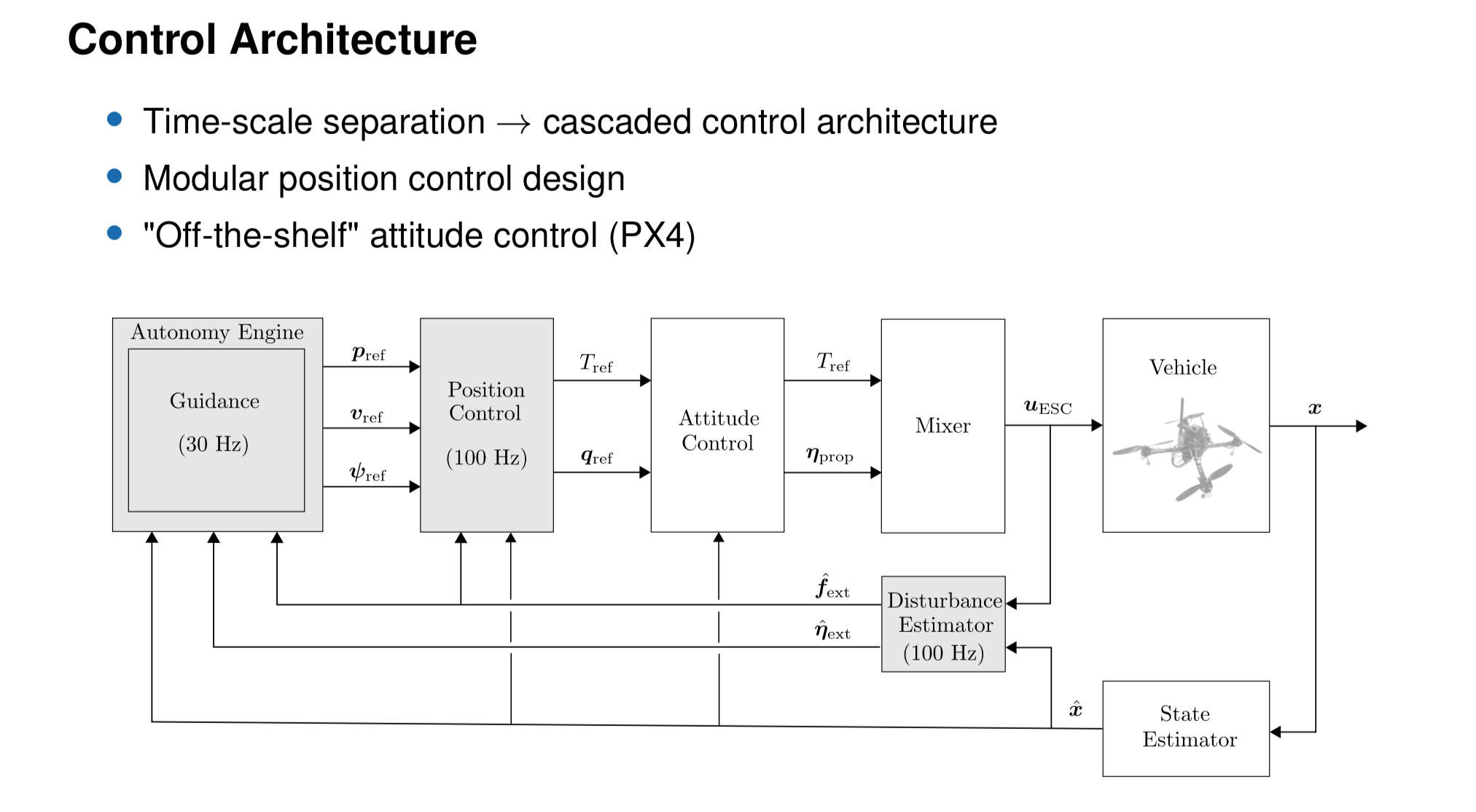
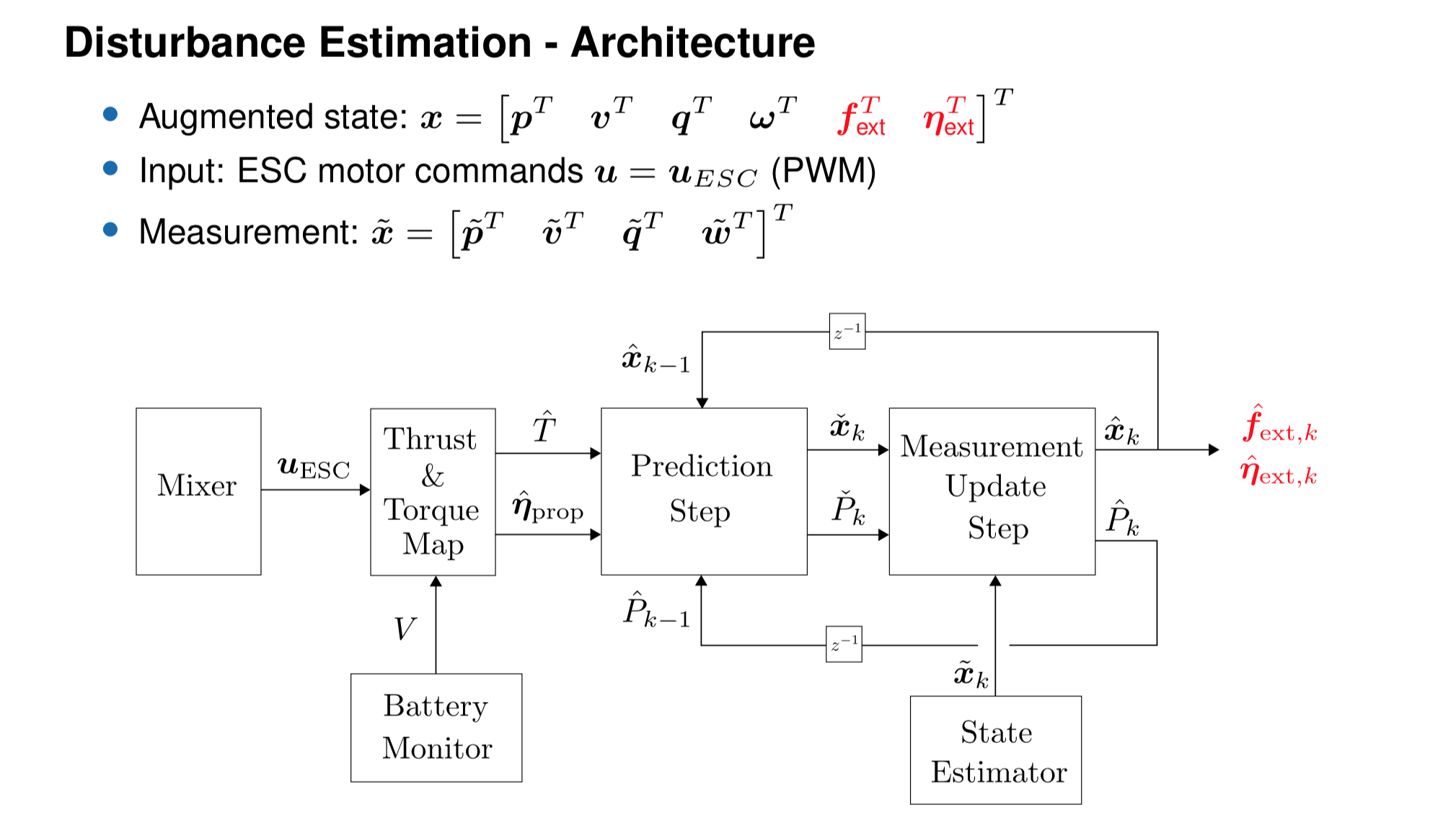
In this 6-month master's thesis project I designed, implemented and tested different classical (PID) and optimal (MPC) flight control and state estimation (EKF, UKF) algorithms from scratch, with the goal of improving the position control accuracy of small unmanned aerial vehicles in the presence of strong and dynamic disturbances such as heavy wind gusts or ground effect.
The developed nonlinear model predictive position controller takes into account the disturbance state, estimated online using an Extended Kalman Filter, to consistently achieve a reduction in position control error in heavy winds of up to around 80% compared to common PID controllers currently used in most industrial UAV applications.
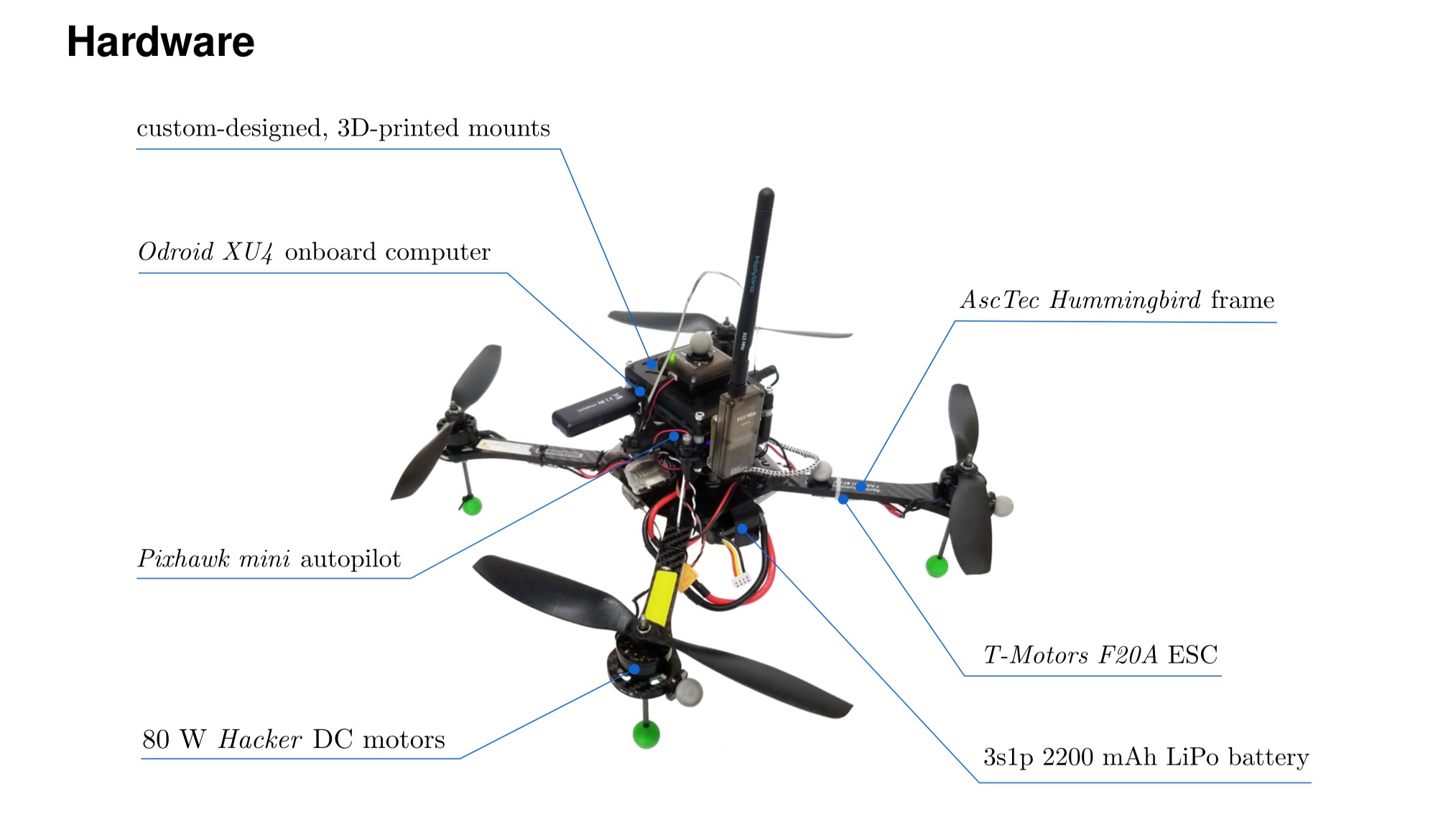
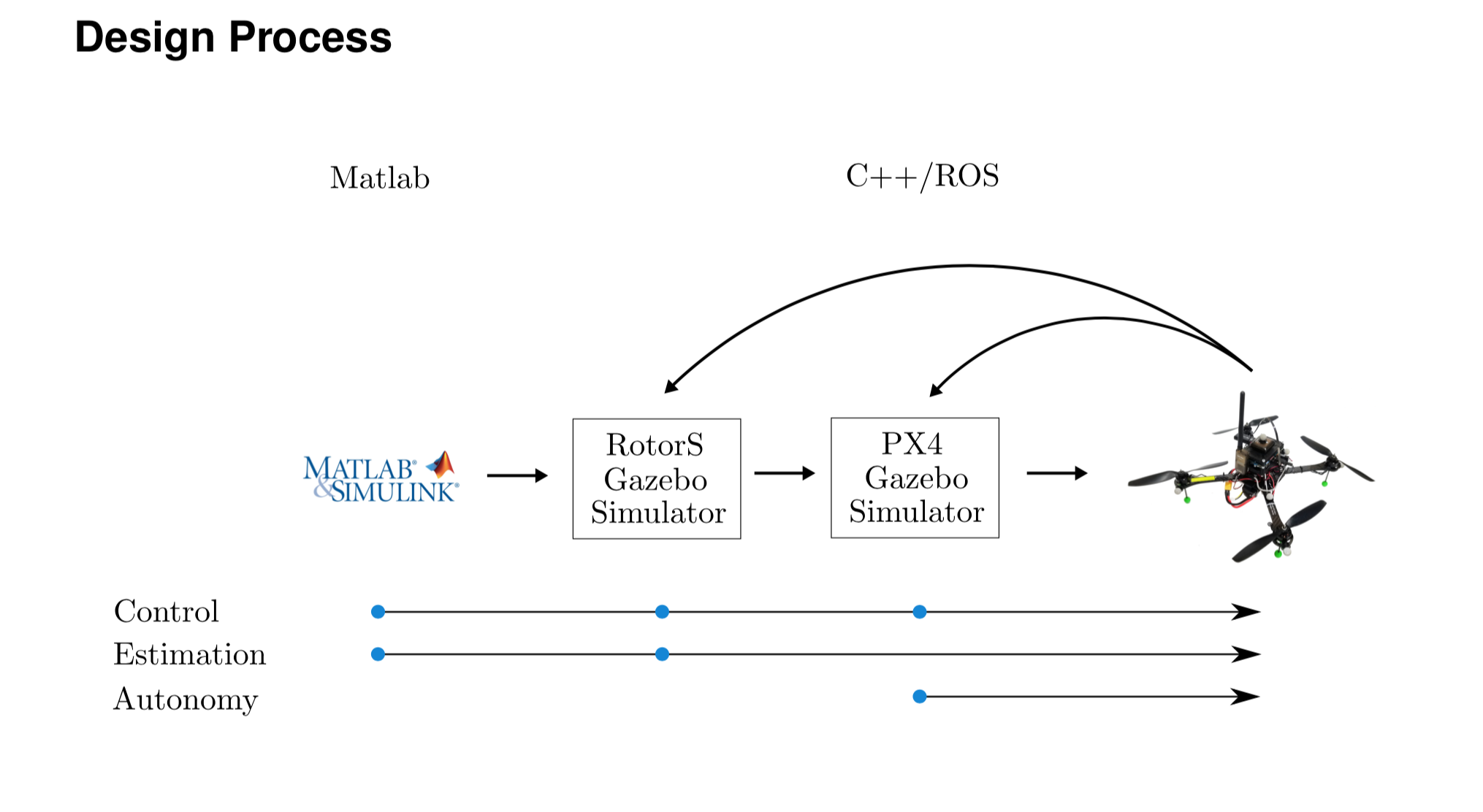
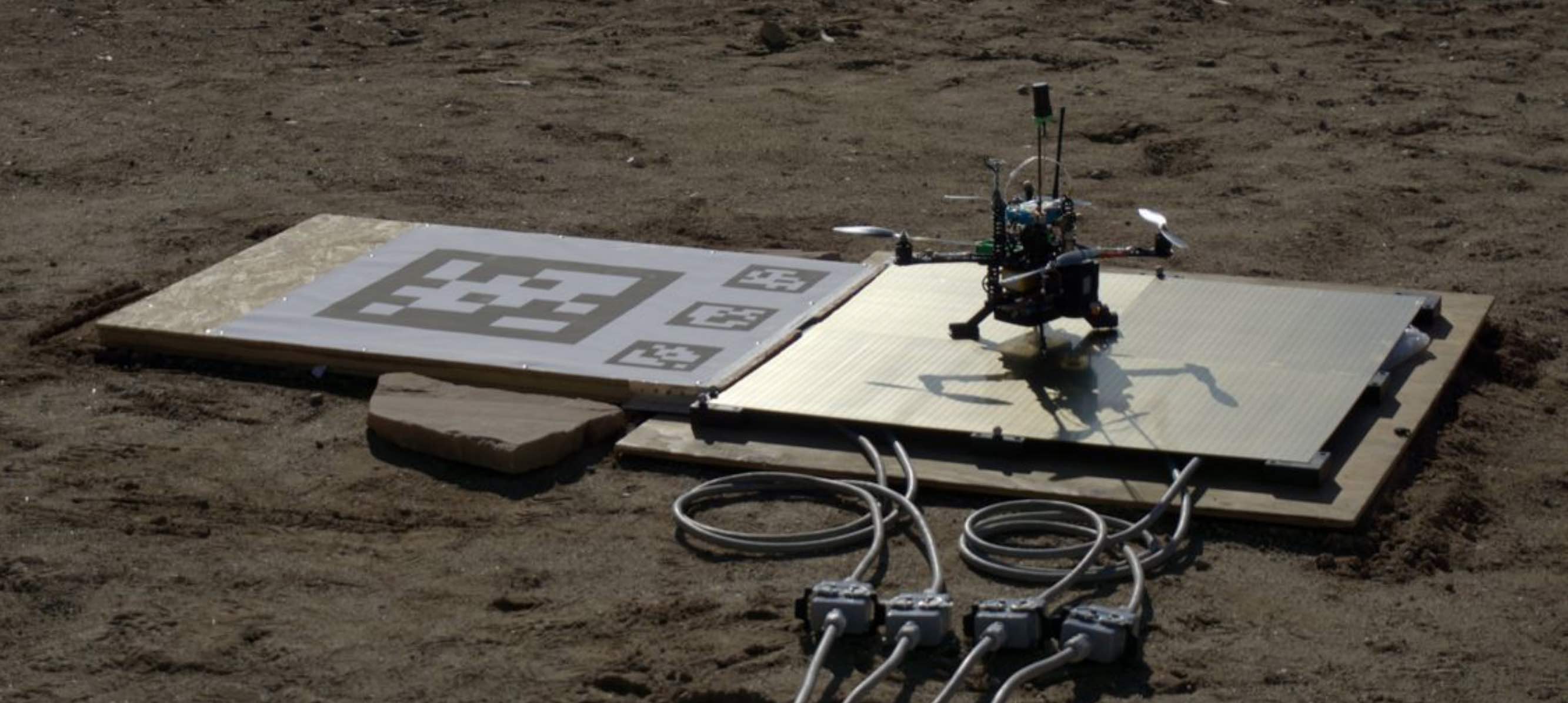
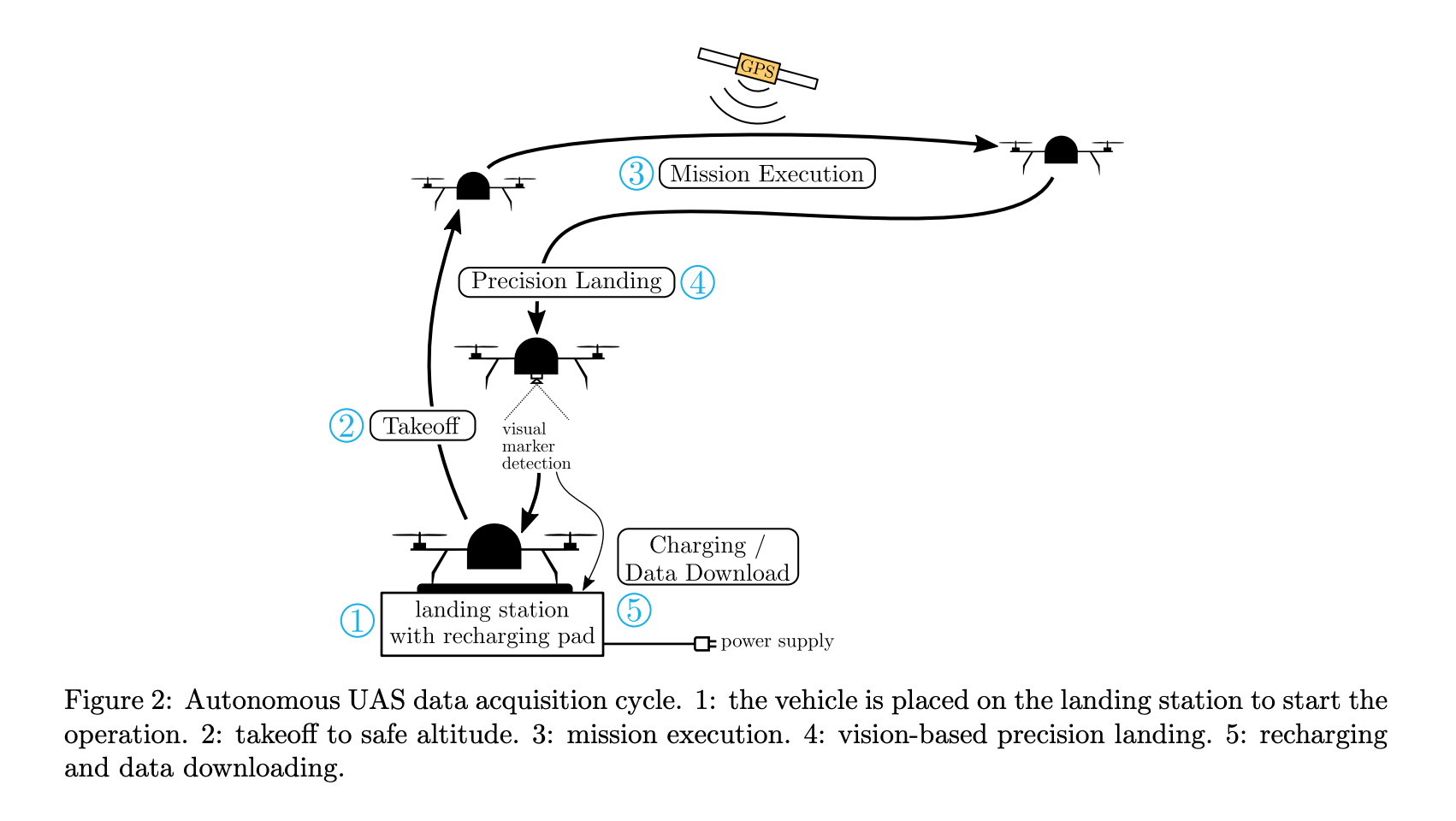
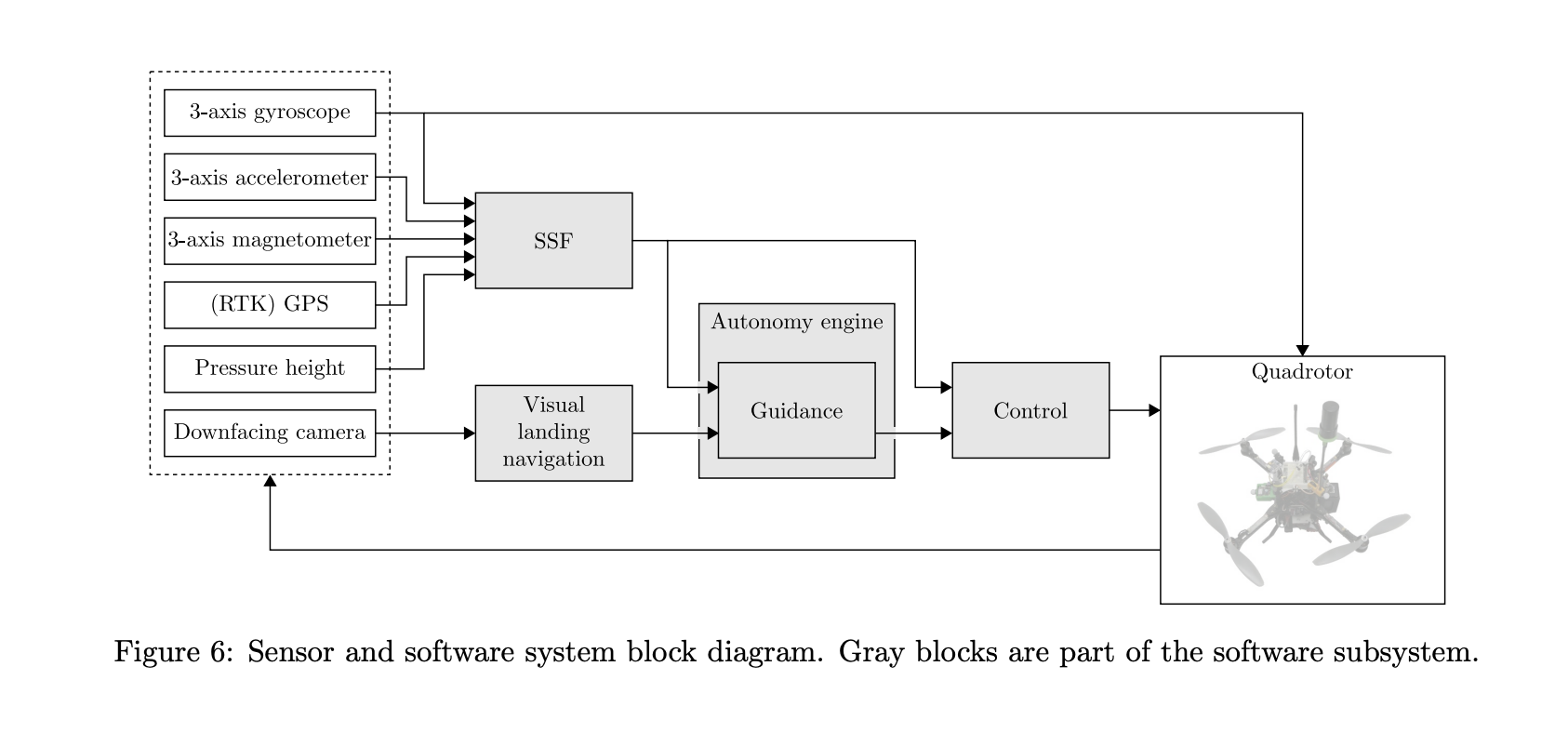
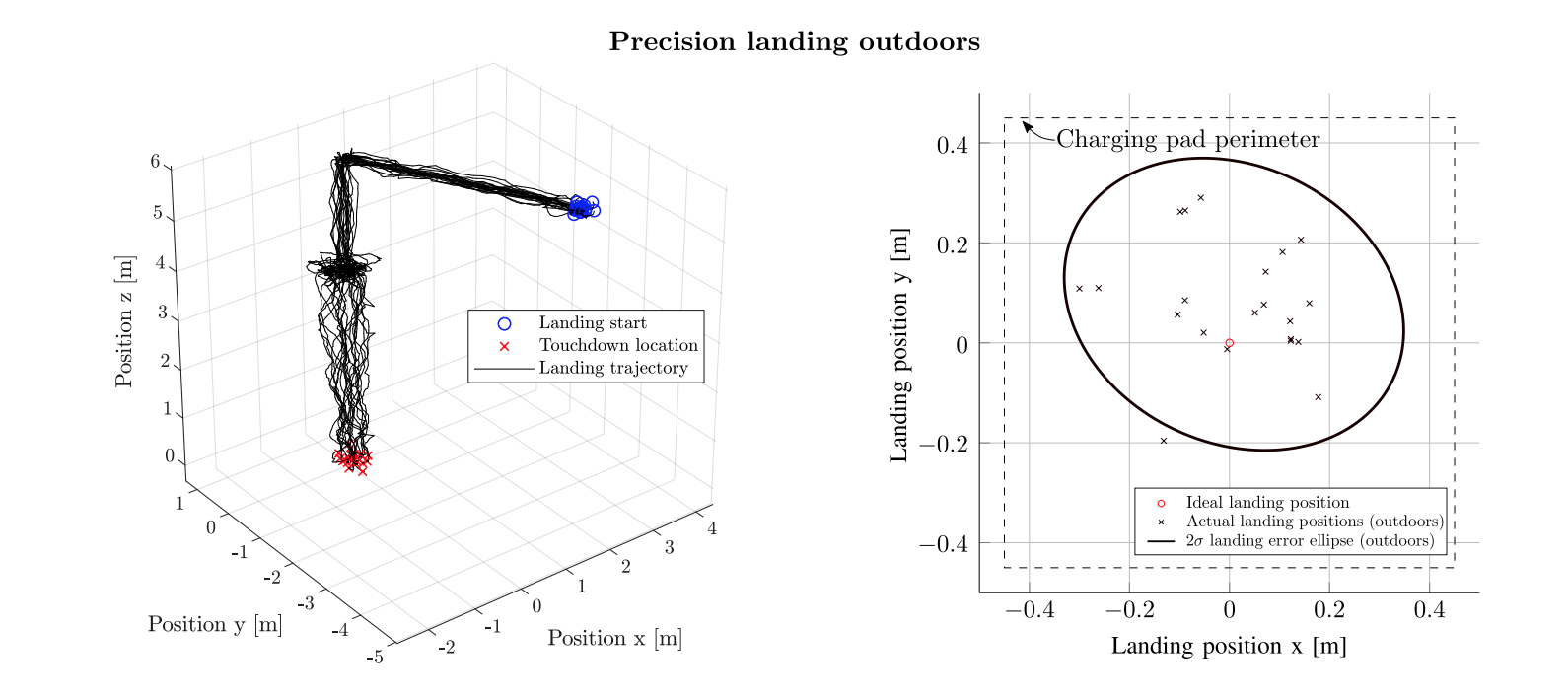
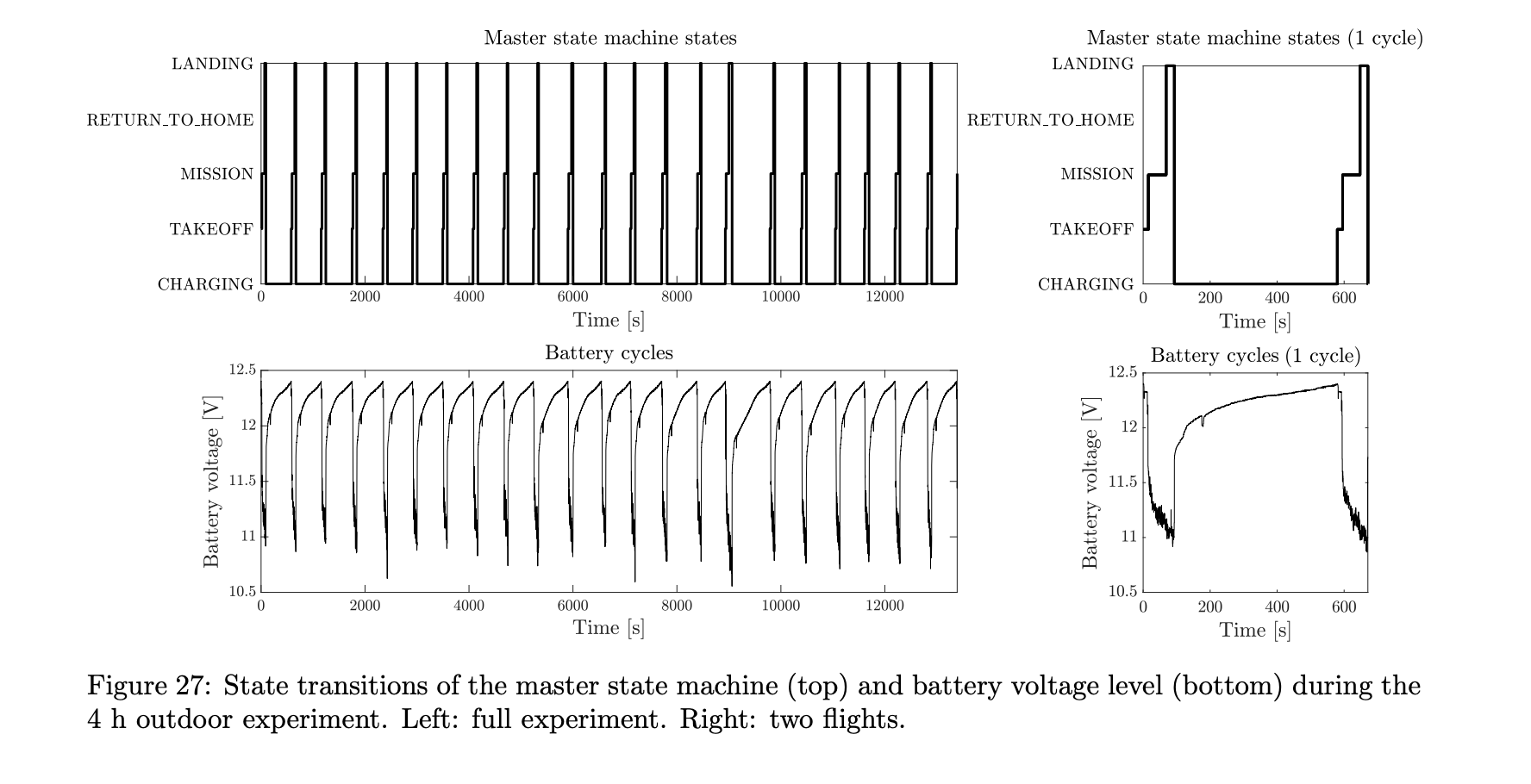
IROS 2019 PaperIn a three-person team in JPL's Computer Vision Group, we developed and implemented a complete guidance, navigation and control framework for a fully autonomous Unmanned Aerial Vehicle, capable of performing repeated flights for long-term observation missions without any human intervention. We addressed two key technologies that are critical for such a system: full platform autonomy to enable mission execution independently from human operators and the ability of vision‐based precision landing on a platform for automated recharging.
My responsibilities included the development of robust flight control and autonomy algorithms, integration of RTK GPS state estimation into the control system and the evaluation of the landing pad pose estimation accuracy. In April 2018, we achieved an 11 hour fully-autonomous indoor flight, as well as a 4 hour outdoor flight without the need for human intervention.
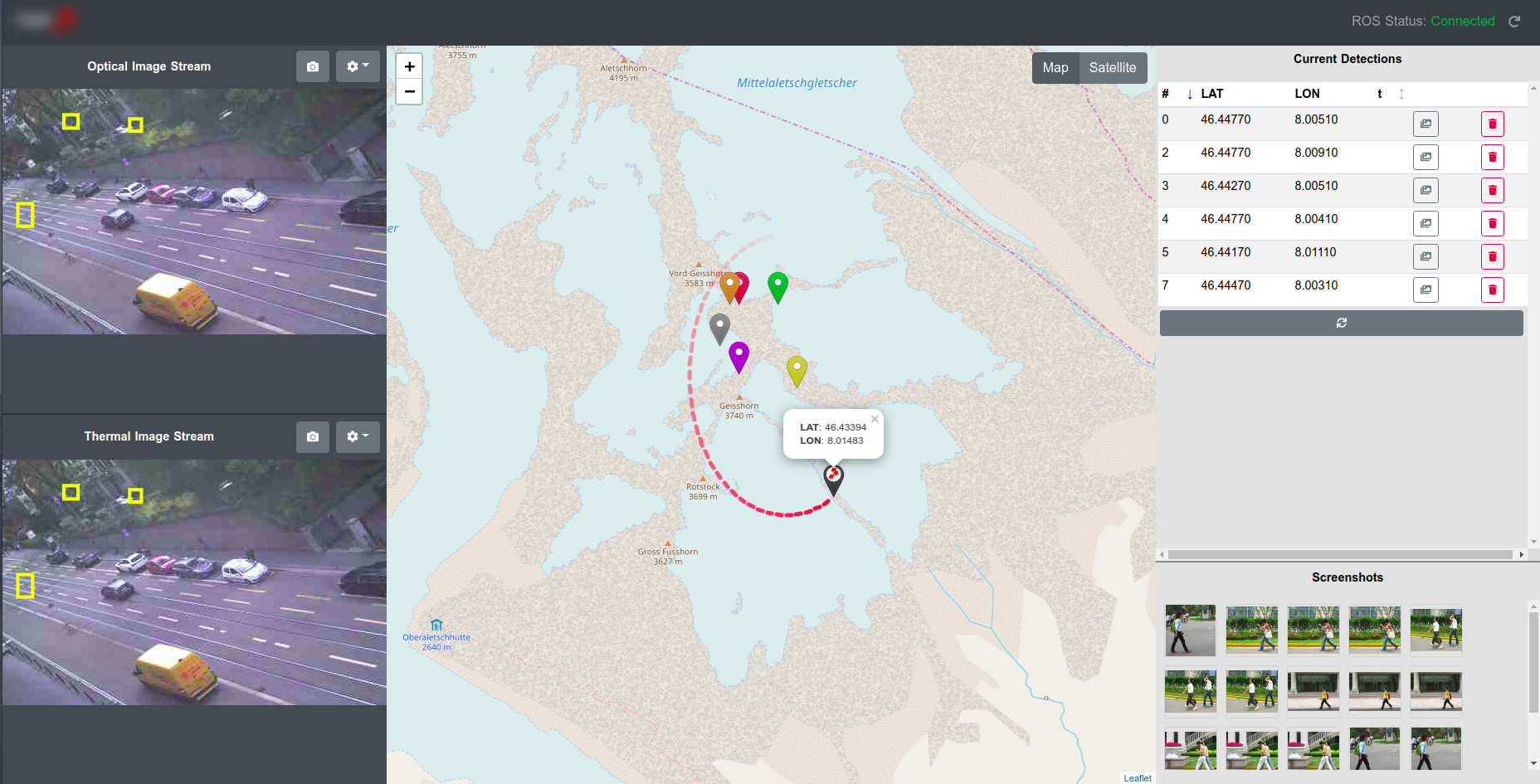
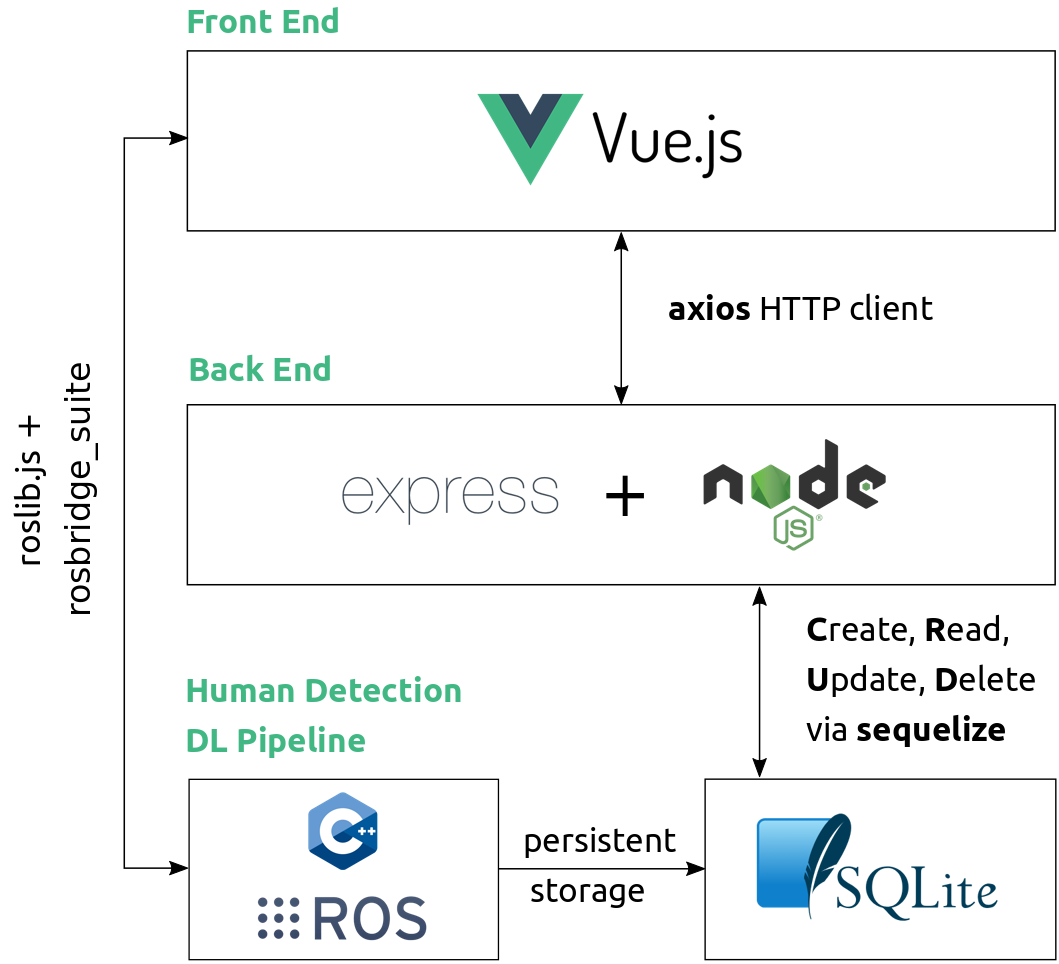
JFR Paper IROS 2018 PaperIn this project, I delved into web development for the first time. My goal was to develop an intuitive user interface to a ROS-based search-and-rescue drone without the need for a native ROS installation or the use of a Linux OS (hence the choice to go browser-based). The UI is used by first responders to visualize two live camera streams, the humans detected by the onboard neural network (in the form of bounding boxes overlaid on the image streams as well as GPS markers on a map), as well as the current position of the drone.
The frontend (browser) is implemented in vue.js and communicates with the backend (running onboard the drone) over an axios http client and a private LTE connection. The frontend subscribes to live messages from the ROS nodes running onboard the drone using roslib.js. It also reads in the live camera feeds using a websocket transport layer. The backend is implemented in node.js and has CRUD access to a sqlite database storing GPS coordinates of detected humans.
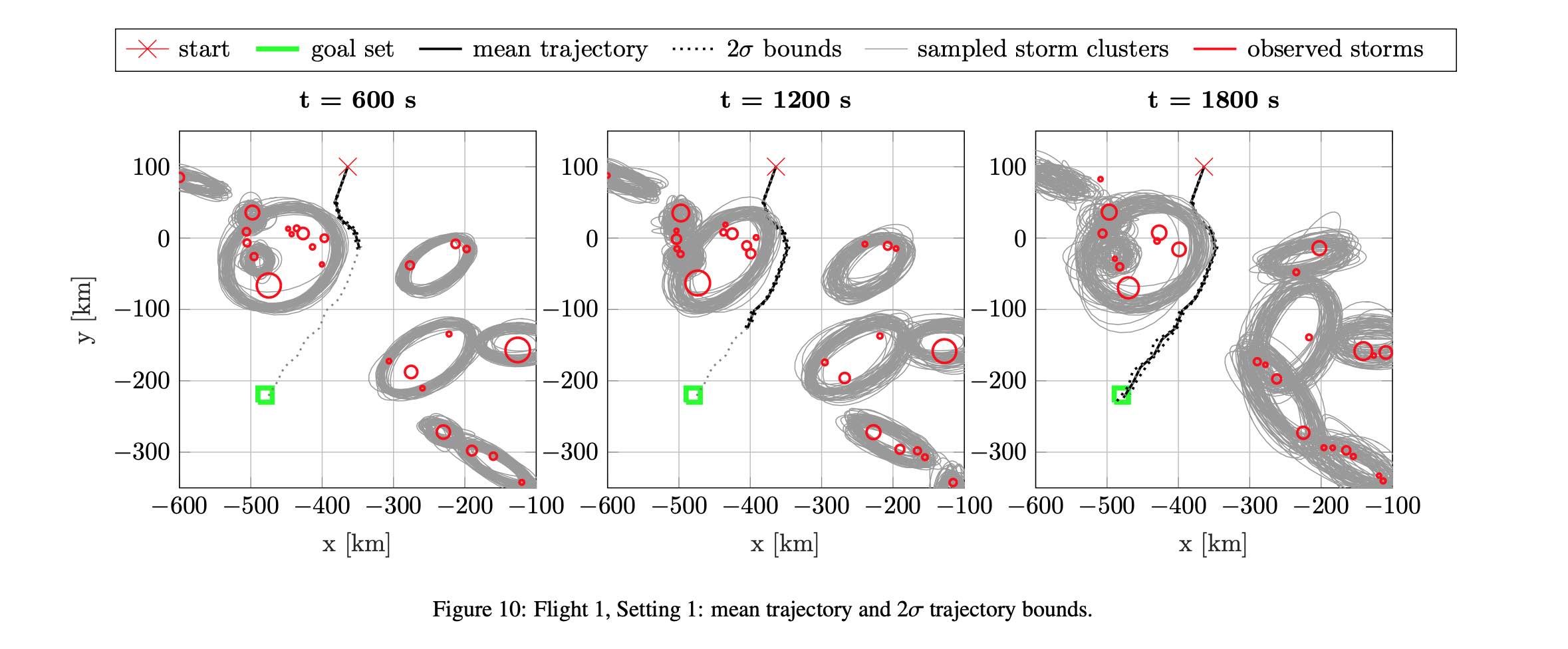
As a student researcher under Prof. Maryam Kamgarpour, I developed a novel data modeling and path planning framework to enable safety-optimal path planning for commercial aircraft flying in the presence of hazardous thunderstorms.
The thunderstorm obstacles are modeled stochastically, based on large meteorological datasets. The stochastic obstacle model is then used within an optimal path planning algorithm solved with dynamic programming. The resulting aircraft trajectories maximize the probability of reaching a given waypoint while avoiding multiple thunderstorms, taking into account uncertainties in both the system dynamics (due to wind disturbance) and the obstacles. The resulting trajectories are validated against actual realizations of thunderstorms.
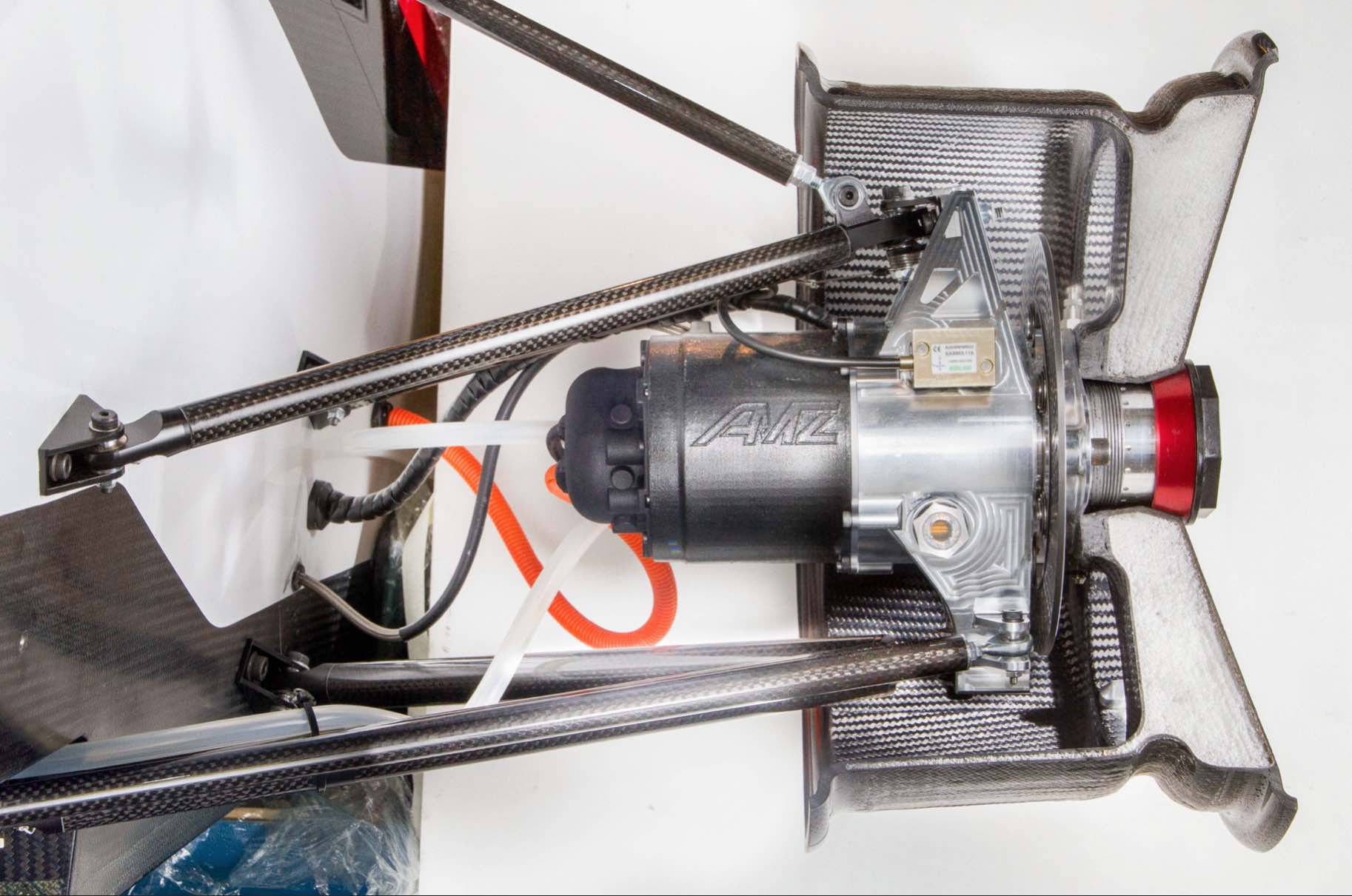
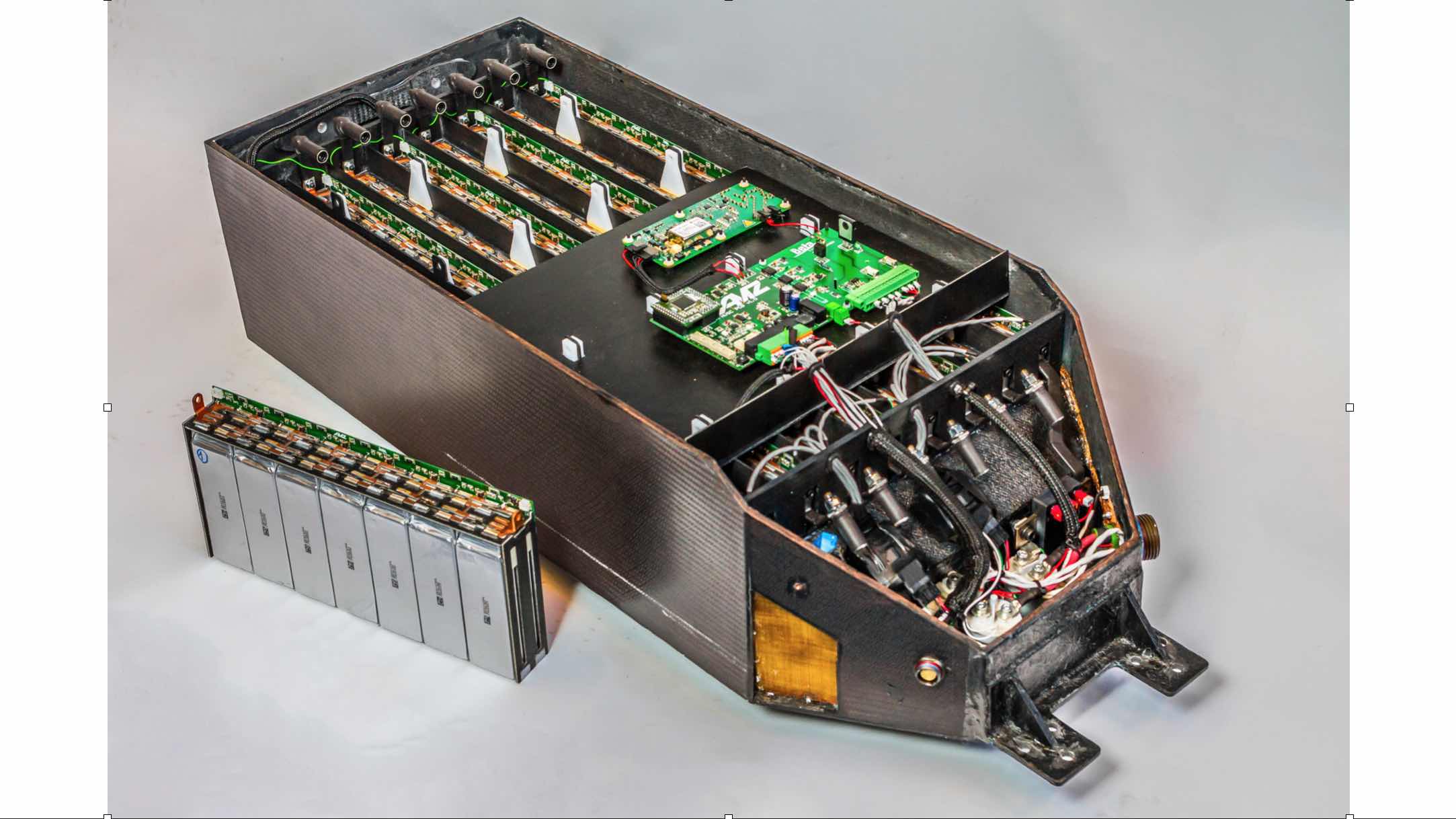
AMZ Racing is one of the world's leading Formula Student teams, and the team behind the world's fastest accelerating electric vehicle. Each year, the team of undergrad students sets out to design, manufacture, test and race the fastest electric racecar in a field of more than a hundred international teams, in the timeframe of merely ten months. After having worked at AMZ as a battery engineer in 2015, I had the pleasure of leading the team as team captain in 2016. Vital aspects of the project management included cost and risk assessment, efficient knowledge transfer and communication as well as competitive yet flexible milestone scheduling.
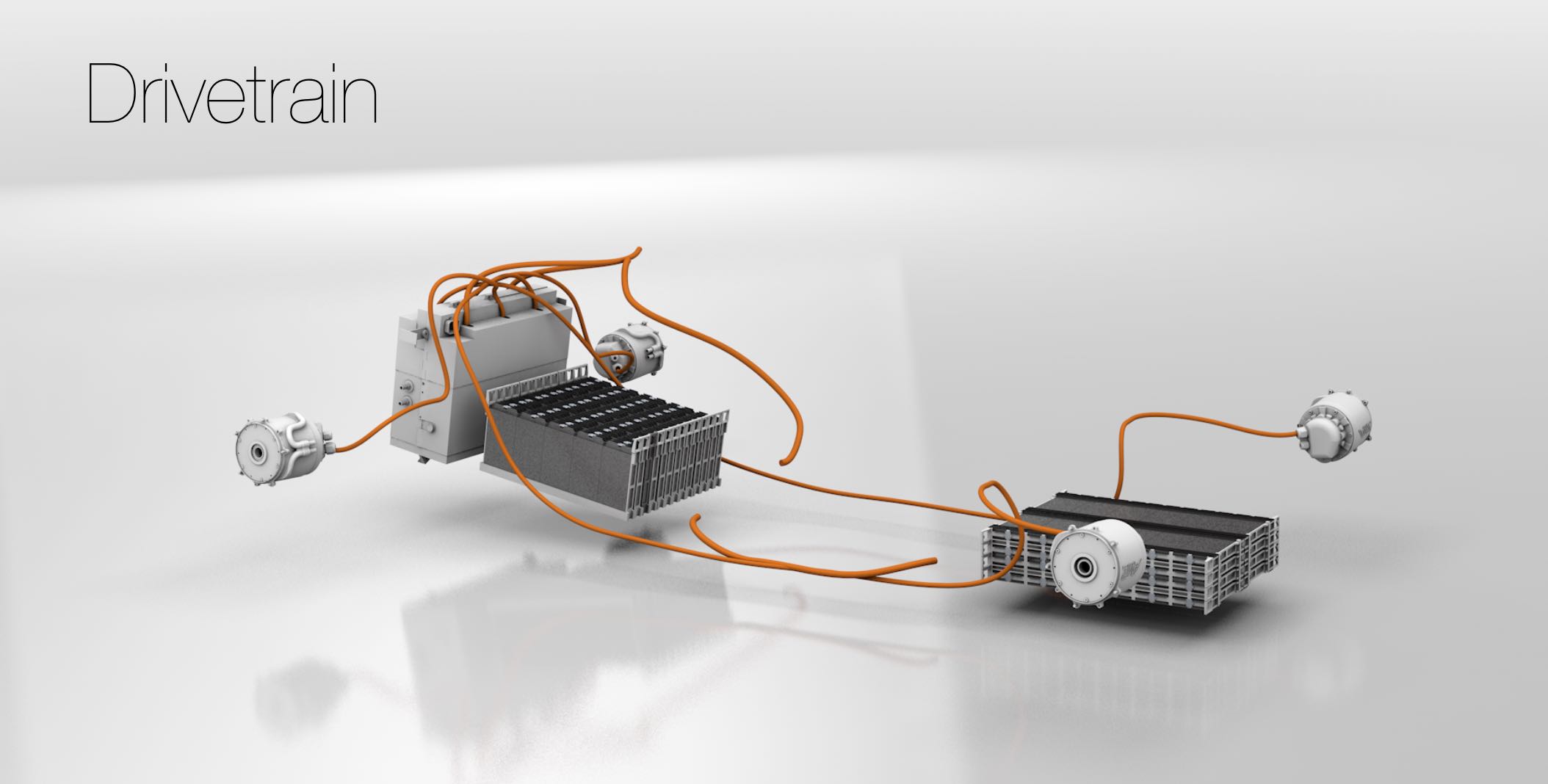
Our tireless work resulted in an electric racecar sprinting from 0 to 100 km/h in only 1.9s. This is made possible by high power (four wheelhub motors delivering 4x39 kW and a peak torque of 375 Nm per wheel), excellent total powertrain efficiency (81%) and a lightweight, carbon-fibre chassis (181 kg total vehicle weight). The organization, quality and level of innovation of our engineering approach was rewarded with glowing feedback from leading automotive and motorsports experts at the 2016 Formula Student competitions, three out of four wins in the Engineering Design category, one overall win and a number of special awards.
Picture Credits: Christian Kreutzmann